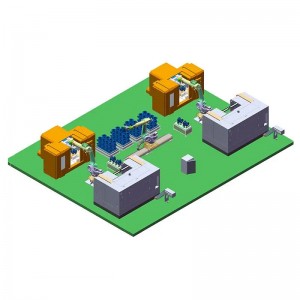
Γραμμή Παραγωγής Soft Gate Valve


1. Ο χειριστής τοποθετεί την παλέτα γεμάτη με τεμάχια σώματος βαλβίδας στη σχισμή τοποθέτησης φόρτωσης 1 και στη σχισμή τοποθέτησης φόρτωσης 2 για τοποθέτηση, και τοποθετεί τον άδειο δίσκο στην υποδοχή τοποθέτησης φόρτωσης 1 και την υποδοχή τοποθέτησης εκφόρτωσης 2 για τοποθέτηση.
2. Η κάμερα στο ρομπότ 1 σαρώνει το τεμάχιο εργασίας στην παλέτα στην υποδοχή τοποθέτησης τροφοδοσίας 1 για να τοποθετήσει με ακρίβεια το τεμάχιο εργασίας και το τεμάχιο εργασίας 1 συσφίγγεται και τοποθετείται στο εξάρτημα τοποθέτησης στον πίνακα αποθήκευσης 1.
Ταυτόχρονα, πιάνει το επεξεργασμένο τεμάχιο εργασίας 3 (το ρομπότ 2 το έχει μόλις πιάσει από την εργαλειομηχανή 2), μετακινείται στην υποδοχή τοποθέτησης εκφόρτωσης 1 και το τοποθετεί προσεκτικά στην παλέτα, όπως απαιτείται.
Η κάμερα στο ρομπότ 1 σαρώνει το τεμάχιο εργασίας στην παλέτα στην υποδοχή τοποθέτησης τροφοδοσίας 2 για να τοποθετήσει με ακρίβεια το τεμάχιο εργασίας και το τεμάχιο εργασίας 4 συσφίγγεται και τοποθετείται στο εξάρτημα τοποθέτησης στον πίνακα προσωρινής αποθήκευσης 2.
Ταυτόχρονα, πιάνει το επεξεργασμένο τεμάχιο εργασίας 6 (το ρομπότ 3 μόλις το έχει πιάσει από την εργαλειομηχανή 4), μετακινείται στην υποδοχή τοποθέτησης εκφόρτωσης 2 και το τοποθετεί προσεκτικά στην παλέτα, όπως απαιτείται.
3. Το ρομπότ 2 συσφίγγει το τεμάχιο εργασίας 1 από τον πίνακα απομόνωσης 1 και τρέχει προς την εργαλειομηχανή 1, πιάνει το τελειωμένο τεμάχιο εργασίας 2 και σφίγγει το τεμάχιο εργασίας 1, τρέχει στην εργαλειομηχανή 2, πιάνει το έτοιμο τεμάχιο εργασίας 3 και σφίγγει το τεμάχιο εργασίας 2 , και τρέχει στον πίνακα προσωρινής αποθήκευσης 1. Τοποθετήστε το τεμάχιο εργασίας 3. Το ρομπότ 2 ολοκληρώνει τον κύκλο.
4. Το ρομπότ 3 πιάνει το τεμάχιο εργασίας 4 από το τραπέζι αποθήκευσης 2 και τρέχει προς την εργαλειομηχανή 3, πιάνει το τελειωμένο τεμάχιο εργασίας 5 και σφίγγει το τεμάχιο εργασίας 4, τρέχει στην εργαλειομηχανή 4, πιάνει το έτοιμο τεμάχιο εργασίας 6 και σφίγγει το τεμάχιο εργασίας 5 , και τρέχει στον πίνακα προσωρινής αποθήκευσης 2. Τοποθετήστε το τεμάχιο εργασίας 6. Το ρομπότ 3 ολοκληρώνει τον κύκλο.